5.3. voraus.app //Roboception
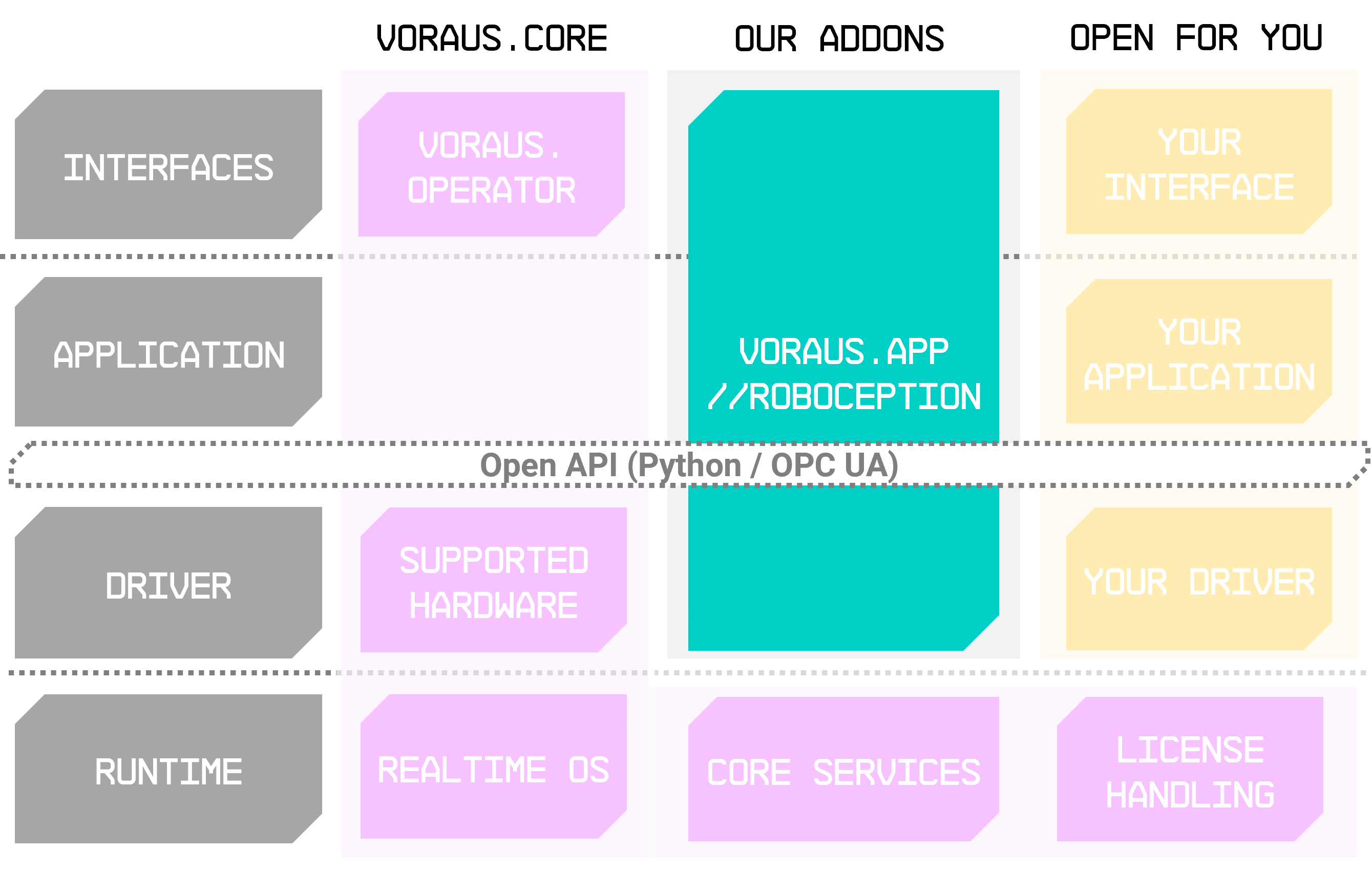
Fig. 89 voraus.app //Roboception running as addon to the voraus.core
The voraus.app //Roboception (see Fig. 89) is bridging the cutting-edge Roboception cameras with industrial robots controlled via the powerful voraus.core. Designed for seamless integration and optimal performance, it offers a simple configuration interface for communication with the Roboception device, a Python interface to the Roboception API, and a command library for the voraus.core. Additionally, it provides a fully graphical user interface within the voraus.operator for intuitive no-code programming, which can be used alongside the Python path. This gives users the flexibility to choose between both, according to their preferences and requirements.
You can find a detailed explanation of the Roboception integration into the voraus.core here. The command section shows more information about the Roboception specific commands for the voraus.operator.
Benefits
Integration Excellence – voraus.core serves as the essential connection between Roboception cameras and industrial robots, ensuring smooth communication and streamlined operations.
User-Friendly Interface – Bringing Roboception’s easy-to-use user interface into the world of robot programming with the voraus.core, facilitating enhanced productivity.
Combine skills – Vision programmer can easily handle robotic task due to the seamless graphical UI and Python integration. No need for an additional robotic expert.
Versatile Compatibility – Compatible with a range of Roboception controllers, voraus.core offers flexibility in deployment across various industrial settings.
Cost attractive – Create a full automation solution using Roboception and voraus software. Reduce PLC, robot programming and license cost.
5.3.1. Installation
There are currently three supported ways of running the voraus software stack:
On a pre-configured voraus.ipc (see voraus.ipc).
On a local device such as a laptop (see Installation for Virtual Evaluation Systems).
Directly on an rc_cube delivered by Roboception.
This section will guide you on how to set up your system to use the voraus software stack with the activated voraus.app //Roboception.
Installation on a voraus.ipc
Your voraus.ipc should already come pre-configured. In case changes to the software stack have to be made, connect your voraus.ipc to your personal computer like described in voraus.ipc. Then, follow the steps described in Access the voraus.core software stack.
Find your fitting use case in Base stack configurations if you want to configure the voraus software stack from scratch. Otherwise just follow the instructions of Activate the voraus.app //Roboception.
Installation on a local device
Follow the instructions of Installation for Virtual Evaluation Systems. In the docker compose file provided by voraus, make sure that the voraus.app //Roboception is activated like described in Activate the voraus.app //Roboception.
Alternatively use the stack compose file described in Docker Compose Environment and follow the steps described in Activate the voraus.app //Roboception.
Installation on an rc_cube
Instead of running the voraus.core on a voraus.ipc or a local device (see Installation for Virtual Evaluation Systems), it can also run on several Roboception controllers that come with the UserSpace feature. The list of Roboception controllers includes, but is not limited to:
rc_cube I Industrial Edge Computer
rc_cube S Edge Computer
You should already have access to the Web GUI of the Roboception controller. Use the rcdiscover tool provided by Roboception to initially connect to the camera and afterwards configure the network settings according to your needs. For further information on how to get access to the Web GUI, please refer to Roboception’s documentation.
Open the Roboception Web GUI in your browser and navigate to the UserSpace section. The underlying Portainer UI can be accessed by clicking the Manage UserSpace Apps button. From here, follow the same instructions as described in Create a new stack.
The compose file to use for your stack depends on the voraus.core version you are using. Find your fitting use case in Base stack configurations.
Base stack configurations
The following subsections will guide you through the base stack configuration for the respective robot you want to use.
Remember to replace the voraus-core:<core-image-tag> and the voraus-codemeter:<codemeter-image-tag>
with your software versions.
After configuring the stack for the respective robot, follow the steps described in Activate the voraus.app //Roboception before applying the changes.
Configuration for the voraus.core //virtual
If you want to use the Roboception with a virtual robot, use the compose file described in Docker Compose Environment. Simply replace the VORAUS__robot__robotType with your desired robot model. All available robot models are listed in the same section.
Configuration for the voraus.core //FANUC
If you want to use the Roboception together with a real FANUC robot, first follow the installation instructions of the voraus.core //FANUC.
Use the mentioned compose file of that chapter. Remember to configure the FANUC_ADDRESS and RMI_PORT variables of the compose file according to your needs.
Configuration for the voraus.core //KUKA
If you want to use the Roboception together with a real KUKA robot, first follow the installation instructions of the voraus.core //KUKA.
Use the mentioned compose file of that chapter. Remember to configure the IP addresses and ports of the compose file according to your needs.
Activate the voraus.app //Roboception
To activate the voraus.app //Roboception, add the following to the compose file:
environment:
...
VORAUS__components__voraus-roboception-app__enabled: True
...
ports:
...
- 5000:5000 # voraus-roboception-app
...
restart: unless-stopped
...
labels:
- com.roboception.app.http.port=8080
The unless-stopped under restart makes sure that if the rc_cube is restarted, the software stack is as well.
Note
The default port of the voraus.app //Roboception is 5000. It can be adjusted with
environment:
...
VORAUS__components__voraus-roboception-app__bindPort: {new_bind_port}
...
This is only necessary if the default port is already occupied by another app.
License activation
Activate a voraus.core software license by following the steps of the chapter License Activation. In case the software is running on an rc_cube, a license dongle is needed in order to run the voraus software. Follow the steps described in Dongle License Activation to activate your license.
5.3.2. Open the voraus.operator on an rc_cube
Once the voraus.core is configured inside the rc_cube’s Portainer UI, you can access the voraus.operator by navigating to the UserSpace section and clicking either on the Open embedded or Open external button of the voraus.core app, like shown in (Fig. 90). Changing the port of the voraus.operator is described in the Installation chapter of your voraus.core documentation (see voraus.core).
Opening the Portainer UI in an external window is not possible, if the Web GUI is accessed directly via a monitor connected to the Roboception device.
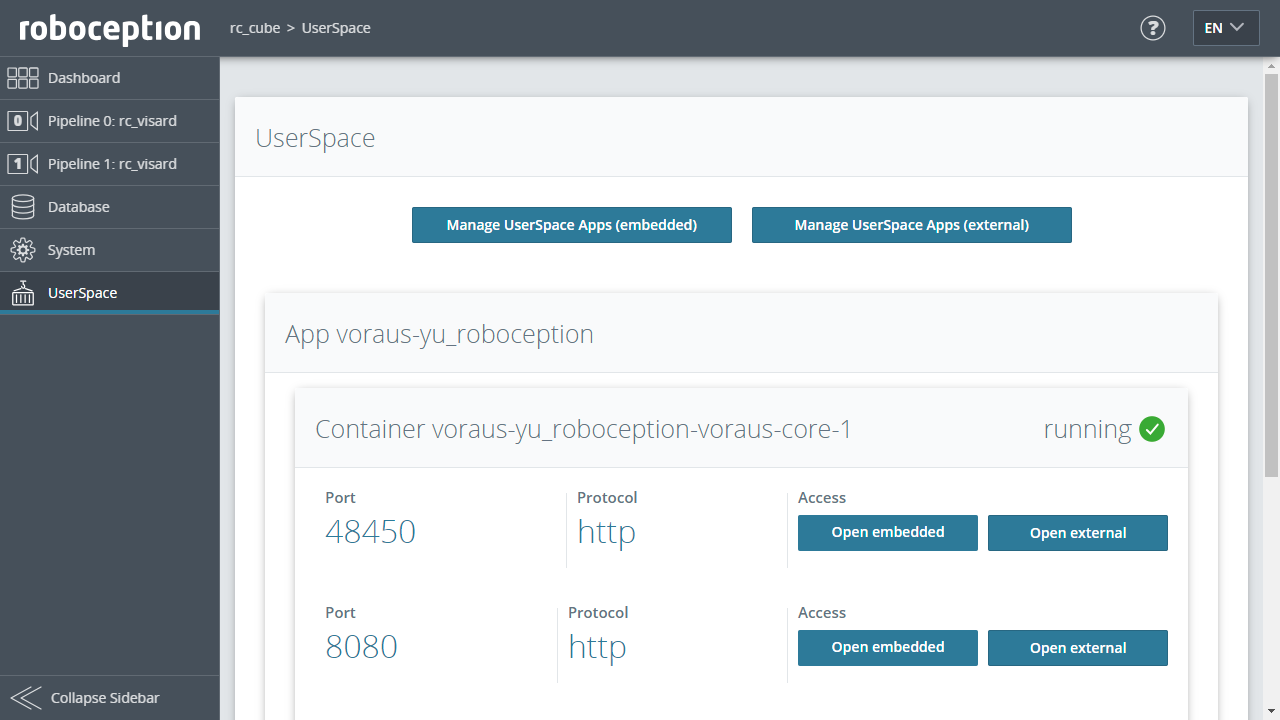
Fig. 90 Example of the Roboception UserSpace
5.3.3. Quick Setup Guide
For a quick setup guide and other tutorials, please refer to the user documentation. Among other things, you will learn how to calibrate your camera and implement a first Box Pick application within minutes.