1. Introduction
The voraus.app //Roboception is bridging the cutting-edge Roboception cameras with industrial robots controlled via the powerful voraus.core. Designed for seamless integration and optimal performance, it provides a simple configuration interface for communication to the Roboception device, a Python interface to the Roboception API and a command library for the voraus.core. This documentation gives an overview of the Roboception integration into the voraus.core.
The shipped commands integrate the Roboception features directly into the programming environment of the voraus software. The Commands documentation provides information for each of the shipped Roboception commands and how to configure them.
Note
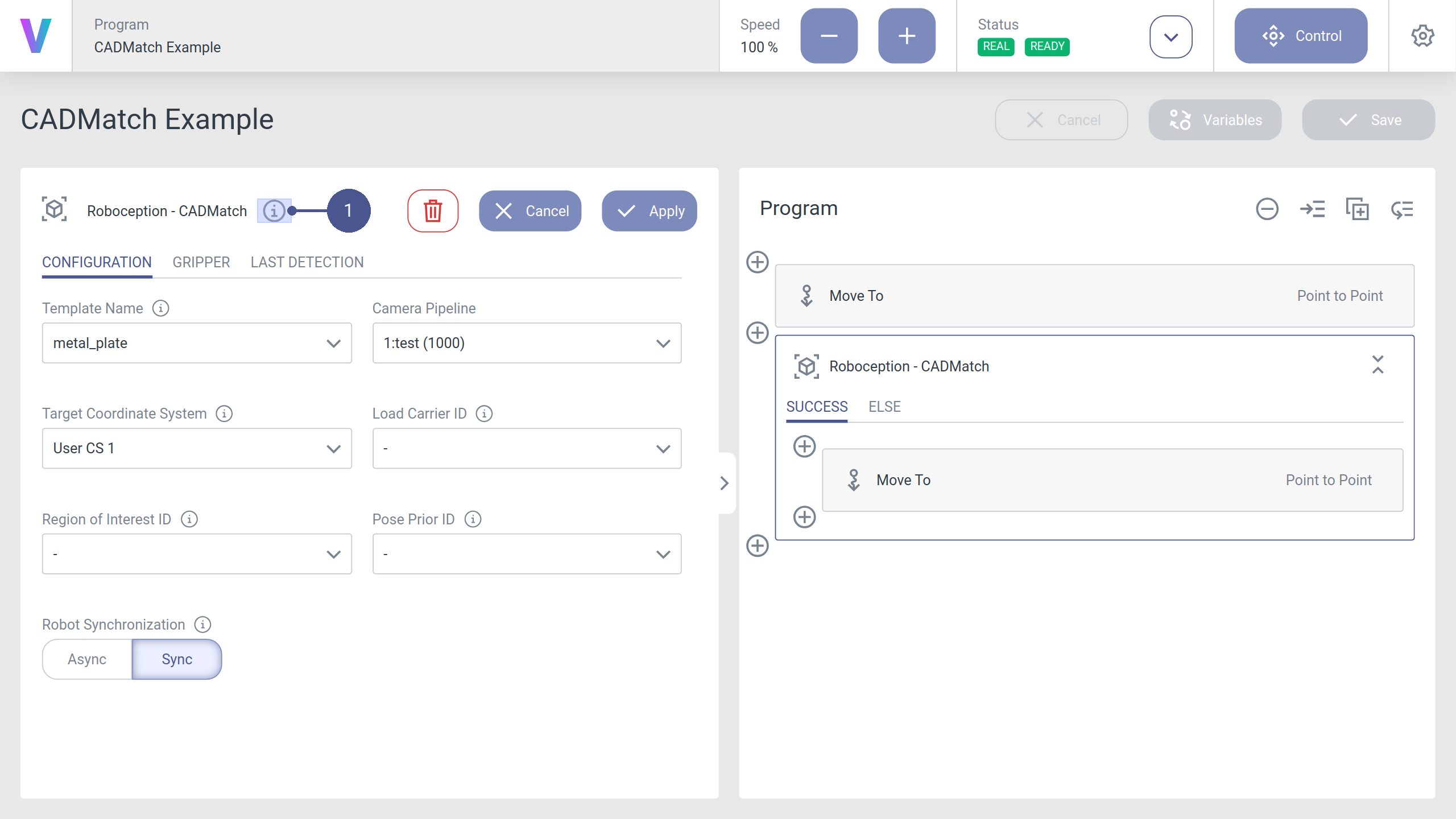
The respective command documentation can also be opened directly from the voraus.operator using the info icon (Fig. 1/(1)).