3.1. Commands
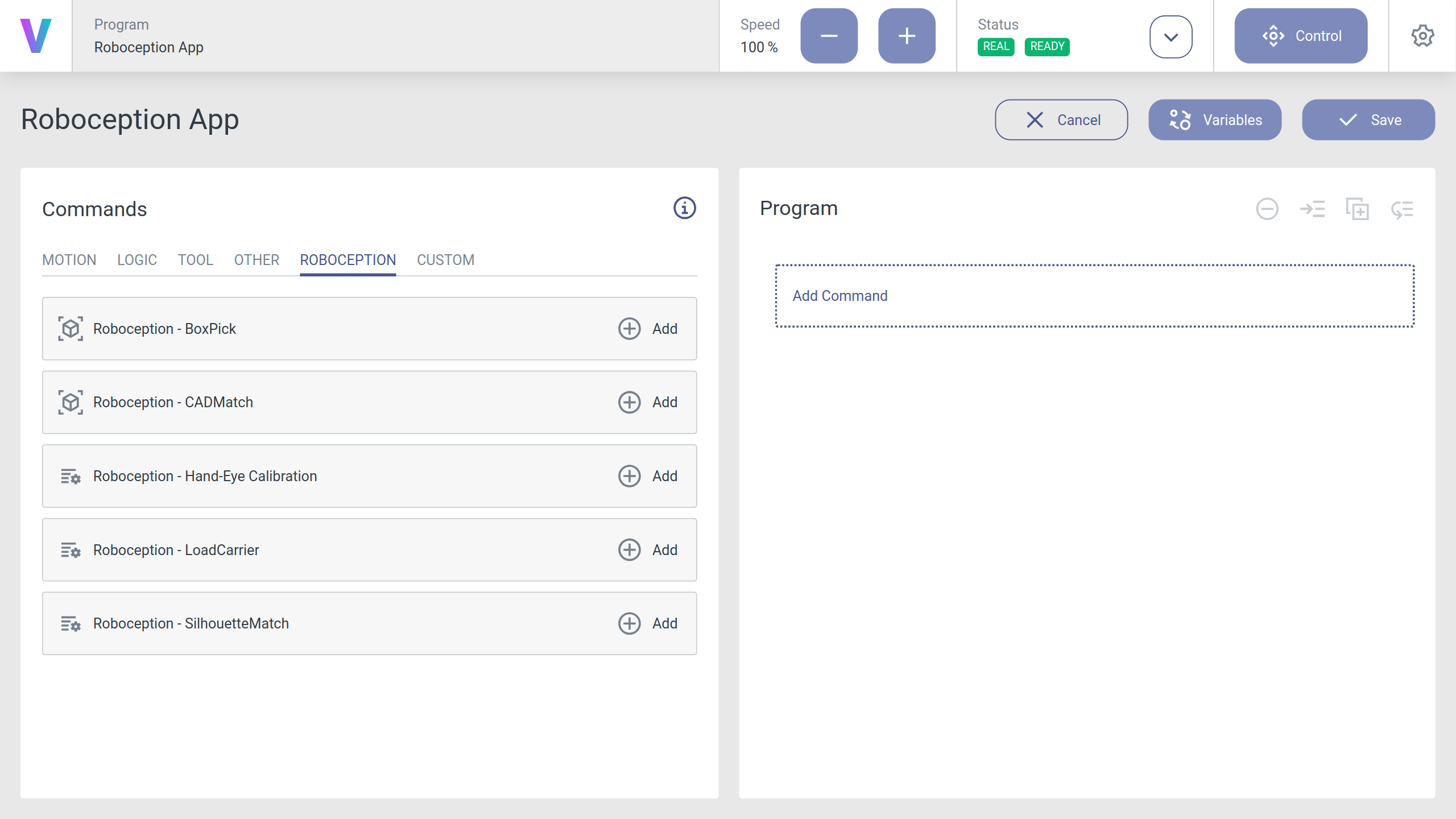
Once installed, all Roboception commands can be found in the ROBOCEPTION commands subsection (Fig. 11).
3.1.1. Available commands
The following commands are currently available:
The command library is currently under development. The following table lists the features and the current state of development.
Feature |
Status |
Comment |
|---|---|---|
Hand-Eye Calibration |
Implemented as a voraus.operator command |
Performs a Hand-Eye Calibration. 6-DOF and 4-DOF robots with statically mounted cameras. Robot mounted cameras will be supported soon. |
BoxPick |
Implemented as a voraus.operator command |
Calls the BoxPick command with a single box definition. |
CAD-Match |
Implemented as a voraus.operator command |
Detection of CAD models with the full feature set. |
SilhouetteMatch |
Implemented as a voraus.operator command |
Calls the SilhouetteMatch command. |
QR Code Detection |
Coming soon [1] |
Calls the QR-Code detection and use the detected poses as coordinate systems. |
AprilTag Detection |
Coming soon [1] |
Calls the AprilTag detection and use the detected poses as coordinate systems. |
LoadCarrier Detection |
Implemented as a voraus.operator command |
Calls the LoadCarrier detection and use the detected poses as coordinate systems. Implicitly integrated to other commands. |
Filling Level Detection |
Coming soon [1] |
Calls the LoadCarrier - Filling Level Detection and return the relative or absolute filling level of cells in a load carrier. |
ItemPick |
Coming soon [1] |
Calls the ItemPick detection and use the detected poses as coordinate systems. |
Robot mounted cameras |
Coming soon [1] |
Currently only statically mounted cameras are supported. Support for robot mounted cameras is coming soon [1], and will be scheduled for the first use-case. |
Multi camera support |
Implemented as a voraus.operator command |
Multiple pipelines of an rc_cube can be used in the same program. Implemented as a voraus.operator command |
Multiple rc_cubes or standalone cameras |
Not supported yet. |
With a future release a single voraus.core will be able to control multiple rc_cubes, but currently the API supports only one. |