3. Usage
In the program editor of the voraus.operator, you can find the Roboception commands in the ROBOCEPTION section of the command library (see Fig. 10).
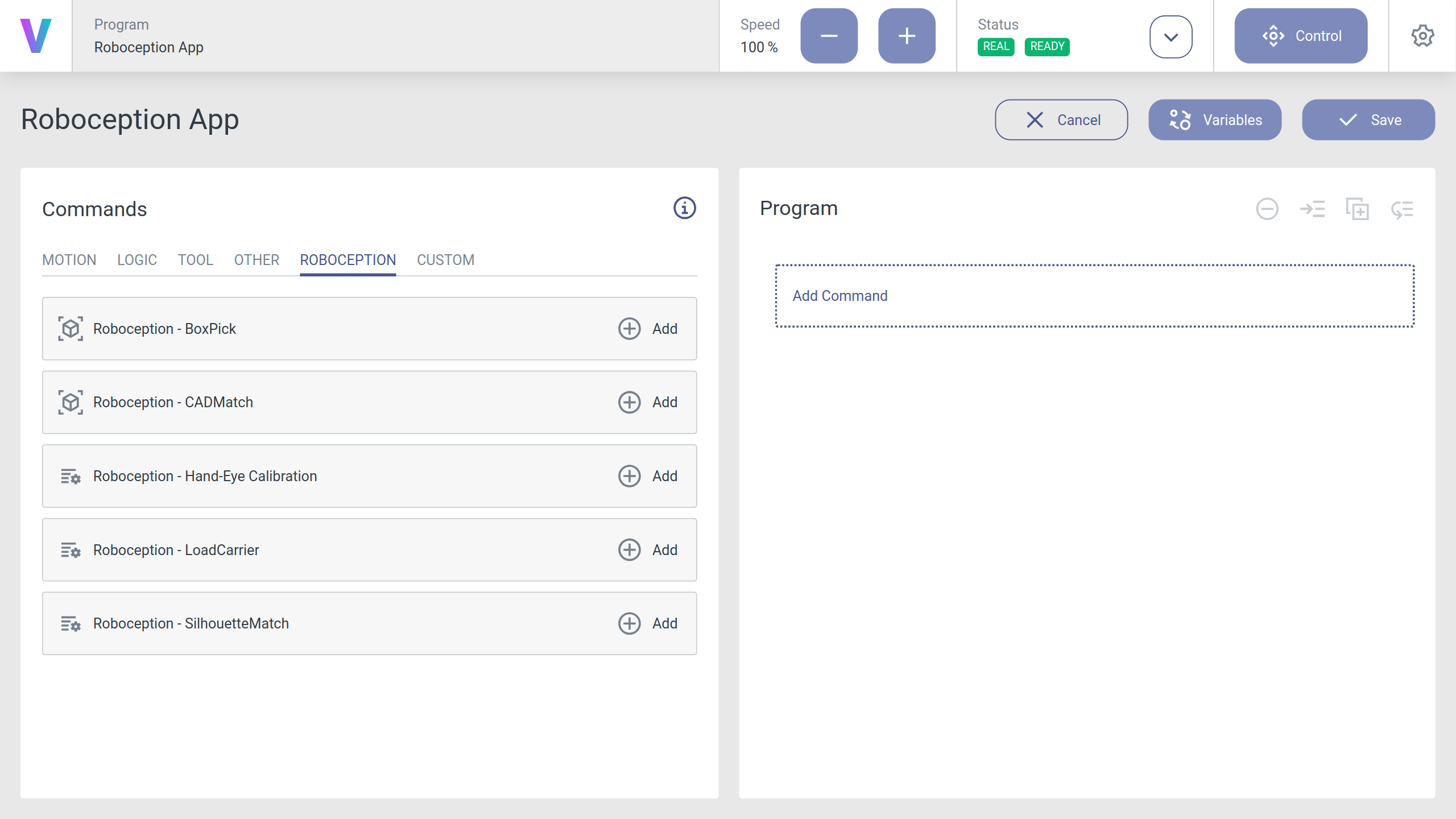
In case you want to detect object poses in the robot’s coordinate system, you will first have to run a Roboception - Hand-Eye-Calibration. See Commands for a detailed documentation for each command.